精简指令集 RISC
ARM属于精简指令集,大约100条左右的指令,先比较于x86汇编,arm不能直接操作内存的加减,只能控制寄存器,所以需要将内存ldr到寄存器中进行操作后返回内存。
比x86(CISC)快
RISC指令集允许通过缩短时钟周期来加速代码执行
端序
arm3之前小端序,之后的架构支持大端序,可以手动设置,而x86和x64仅仅支持小端序。
ARM 基本特性
特权模式
1、不同于x86架构的r0内核模式和r3用户模式,arm提供了更多的特权模式(命名用的是英文的缩写)。
- USR:用户模式 ---> R3:用户运行的层级
- FIQ:快速中断请求模式
- IRQ:中断请求模式
- SVC:管理模式(supervisor) ---> R0:一般操作系统内核运行的层级
- MON:监视模式
- ABT:终止模式
- UND:未定义指令模式
- SYS:系统模式
thumb
都属于arm架构,只不过是指令的长度不同,一个arm程序中可以混用两种指令长度的模式,只需要在汇编代码后面标注就可以。
ARM指令为32位、Thumb为16或者32位。
执行状态选择
0、默认状态下是ARM模式,直到出现显示或者隐式的转换。
1、利用BX、BXL进行跳转的时候,目标寄存器最低位是1(奇数),会切换到thumb模式。
2、程序状态寄存器(CPSR)的T标志位被置起,则切换到thumb模式。
3、32位的thumb指令后面用.W进行标注。
版本问题
thumb-1 用于ARM v6及之前的体系结构,ARM v7只用thumb-2.
条件执行
arm支持 条件执行 :在指令中编码了算数条件,满足条件才会执行。
优点:
- 提高了代码密度
- 减少执行指令的数目
ARM 的每一个指令都支持 条件执行 ,但是默认都是无条件执行的。
桶式位移器
相当于指令的合并操作,在一个指令中包含多步操作。
MOV R1, R0, LSL #1 ;将r0寄存器左移一位后,传递给r1
运行ARM程序
运行
ubuntu1804环境,成功安装qemu,执行显示缺少ld-linux.so.3文件,通过命令
sudo find / -name "ld-linux.so.3"
找到对应的so文件,然后使用命令
qemu-arm -L /usr/arm-linux-gnueabihf/lib/ call_ret
运行arm文件。
或者编译的时候直接使用-static静态编译可以解决问题
避免每次运行的时候使用qemu-***的形式,可以下载
apt install binfmt*
调试
使用gdb远程调试的原理,先本机开一个运行端口,然后gdb远程访问。
数据类型 & 寄存器
ARM 的操作都是基于寄存器的操作,无法像x86那样可以直接操作内存中的内容。
换算
32bit = 4byte = 1word = 1/2dword。
16bit = 半字(half word),不知道为啥会单独出一个半字的数据类型。
16bit:扩展后缀为-h或者-sh对应着,
byte:-b或者-sb对应着字节
ldr = 加载字,宽度四字节
ldrh = 加载无符号的半字,宽度两字节
ldrsh = 加载有符号的半字,宽度两字节
ldrb = 加载无符号的字节
ldrsb = 加载有符号的字节
str = 存储字,宽度四字节
strh = 存储无符号的半字,宽度两字节
strsh = 存储有符号的半字,宽度两字节
strb = 存储无符号的字节
strsb = 存储有符号的字节
寄存器
定义了16个32bit通用寄存器(R0-R15)r0一般也用来放返回值,最后三个有特殊用处,0-12是通用的。
r11:栈帧寄存器
栈帧寄存器,相当于是rbp
r13:栈寄存器
栈指针寄存器,SP。相当于x86架构中的rsp寄存器,永远指向栈顶端。
r14:连接寄存器
连接寄存器,LR。在函数调用中保存返回地址。在BL的时候会把返回地址保存在这个寄存器中,x86会保存在栈顶。
r15:计数寄存器
程序计数寄存器,每次执行一个+8或者+4,类似于rip指令,但是他是支持arm程序直接读写的,并且会执行并跳转,也就是说他并不会一直指向下一条指令,
CPSR:程序状态寄存器
类似于x86里的EFLAG或者RFLAG寄存器,保存程序的一些状态。
E
大小端标志位,0-->小端
T
thumb标志位,thumb状态为1
M
模式标志位,确定当前特权模式。
系统级控制设置
arm利用 协处理器 来支持额外的指令和系统级设置。
以 MMU(内存 管理 单元) 为例。如果系统是支持的,那么就要要向内核或者启动代码提供对应的接口,在x86架构中,这些接口会放在CR0-CR4寄存器中。
在ARM中, 有16个协处理器,CP0-CP15(P0-P15),每个协处理器有16个寄存器和对应的8个操作码。
协处理器只能通过MRC读和MCR写这俩指令来访问。这俩指令的参数一般是编号的形式,例如:读出转换基址寄存器并保存到CR0中。读出p15中的c2和c0保存在r0中。
这些东西常用在固件中,或者嵌入式开发之类的。
MRC p15, 0, r0, c2, c0, 0
x86中的控制寄存器
CPU架构中共有CR0、CR1、CR2、CR3、CR4、CR8共6个控制寄存器,如下图。
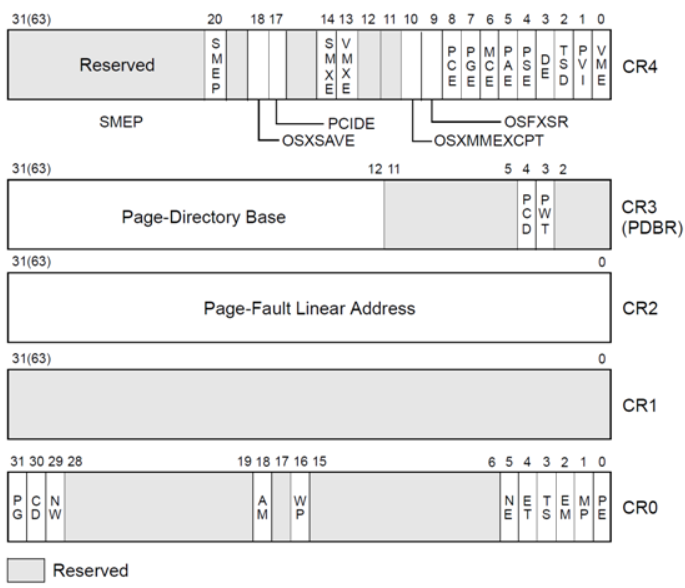
CR0:包含当前处理器运行的控制标志。
CR1:保留。
CR2:包含发生页面错误时的线性地址。
CR3:页面目录表(Page Directory Table)的物理地址。
CR4:包含处理器扩展功能的标志位。
CR8:提供对任务优先级寄存器(Task Priority Register)的读写(仅在64位模式下存在)。
对控制寄存器的读写是通过MOV CRn指令来实现。
ARM 指令集
1、连续横杠间断逗:
PUSH {R11,LR} ;将R11和LR寄存器的值push到栈中。
PUSH {R11,R15} ;将R11 到 R15中的值push到栈中。
2、更新基址用叹号:
STM R1, {R3-R10} ; R1 = 数组
STM R1!, {R3-R10} ; R1 = 数组+1,将R1的地址更新为R10元素之后的一个
数据加载 & 保存
LDR & STR
ldr:从内存向寄存器中加载数据
str:从寄存器中向内存加载数据
从内存中加载和保存1,2,4字节的数据。
LDR R3, [R0] ;取R0地址里的内容给R3寄存器指向的地址 -- R3 = *R0
STR R3, [R0] ;取R3寄存器的值给R0指向的地址 -- R0 = *R3
这里也涉及到了ARM中的9种寻址方式。
- 立即寻址
- 寄存器寻址
- 寄存器间接寻址
- 寄存器移位寻址
- 基址变址寻址
- 相对寻址
- 多寄存器寻址
- 堆栈寻址(块拷贝寻址)
实际运用的时候不需要直到是什么方式寻址,能看懂就行了。
LDM & STM
这个和上面的指令一样,区别是操作的数据大小不同,r结尾的是1,2,4字节,m结尾的是操作数据块。
存在四种模式:
- IA:后递增,写回最后一个地址+4字节地址的地址。
- IB:前递增,把数据存储在基地址+4的地址,写回最后一个地址。
- DA:后递减,最后的地址是基地址,写回最低地址-4。
- DB:前递减:最后的地址是基地址-4,写回最低地址。
类似于x86架构下的rep和movs指令,比如c语言里的memcpy(有时会直接以内联汇编的形式将其附加到代码中,而不是显示的调用这个函数)的功能。
push & pop
这俩个x86架构下的没啥区别,就是x86一般一次一个,这个可以push很多一起进栈。一般用作函数边界的确定。
函数调用
函数调用涉及到了
- 局部变量
- 分支跳转
- 每一次跳转都可以选择thumb和arm
- 返回值
- 默认使用r0寄存器
- 返回地址
- 可以用栈也可以用LR寄存器,但是用栈的话需要显示的将地址pop到PC寄存器中,否则默认LR寄存器。
- 调用约定
- 前4个32位参数放到r0-r3寄存器,其余的用栈。
这几个方面的内容。
跳转指令
B:branch
1、很少遇到的一种无条件跳转,类似于jmp指令。通常用于循环或者判断中,或者调用永不返回的函数
2、只能使用偏移量(当前地址)作为参数,不能跳转寄存器,b R0是非法的
BX:branch exchange
跳转并交换,可以在跳转的时候选择arm或者thumb模式(X结尾的指令),根据目标地址最低位是不是1确定。可以用来跳转寄存器BX R0是合法的。
BX LR 类似于 RET指令
BL:branch and link
跳转并连接指令,类似于call指令,在跳转之前先将返回地址保存到LR寄存器中。
作用和B指令一样,只能跳偏移,不能跳寄存器
BLX:branch linke exchange
如果目的地在32mb之内,使用BL指令较多,跳转地址未知或者不确定,使用BLX指令
arm下调用库函数使用BL
thumb下调用库函数使用BLX
计算
- LSL , (LSR ASR):左移和右移
- ROR , ROL:循环左右移
- ADD , SUB:加减
- MUL,:乘法,arm中没有原生除法。会截断结果为32位
- AND , ORR , EOR:与或非
分支跳转 & 条件执行
主要依赖于一些标志寄存器的值,记不住,到时候现查就行。
一些后缀编码
| EQ | = | Z==1 | ||
|---|---|---|---|---|
| NE | != | Z==0 | ||
| MI | - | N==1 | ||
| PL | +, 0 | N==0 | ||
| HI | unsigned > | C==1 && Z==1 | ||
| LS | unsigned < | C==0 \ | \ | Z==1 |
| GE | >= | N=V | ||
| LT | < | N!=V | ||
| GT | > | Z==0 && N=V | ||
| LE | <= | Z==1 \ | \ | N!=V |
跳真不跳假。比如BLT这个指令:如果LT为真,则跳转。默认情况下不会更新标志位,除非使用了S后缀。
比较指令会自动更新标志位。
JIT和SMC
just-in-time:即时编译
SMC:自修改代码(逆向中的一种反调试技巧)。
arm支持这些玩意。